~/boost_1_60_0/
integrate_const( stepper, system, x0, t0, t1, dt, observer)
#include <iostream>
#include <boost/numeric/odeint.hpp> // odeint function definitions
using namespace std;
using namespace boost::numeric::odeint;
// Defining a shorthand for the type of the mathematical state
typedef std::vector< double > state_type;
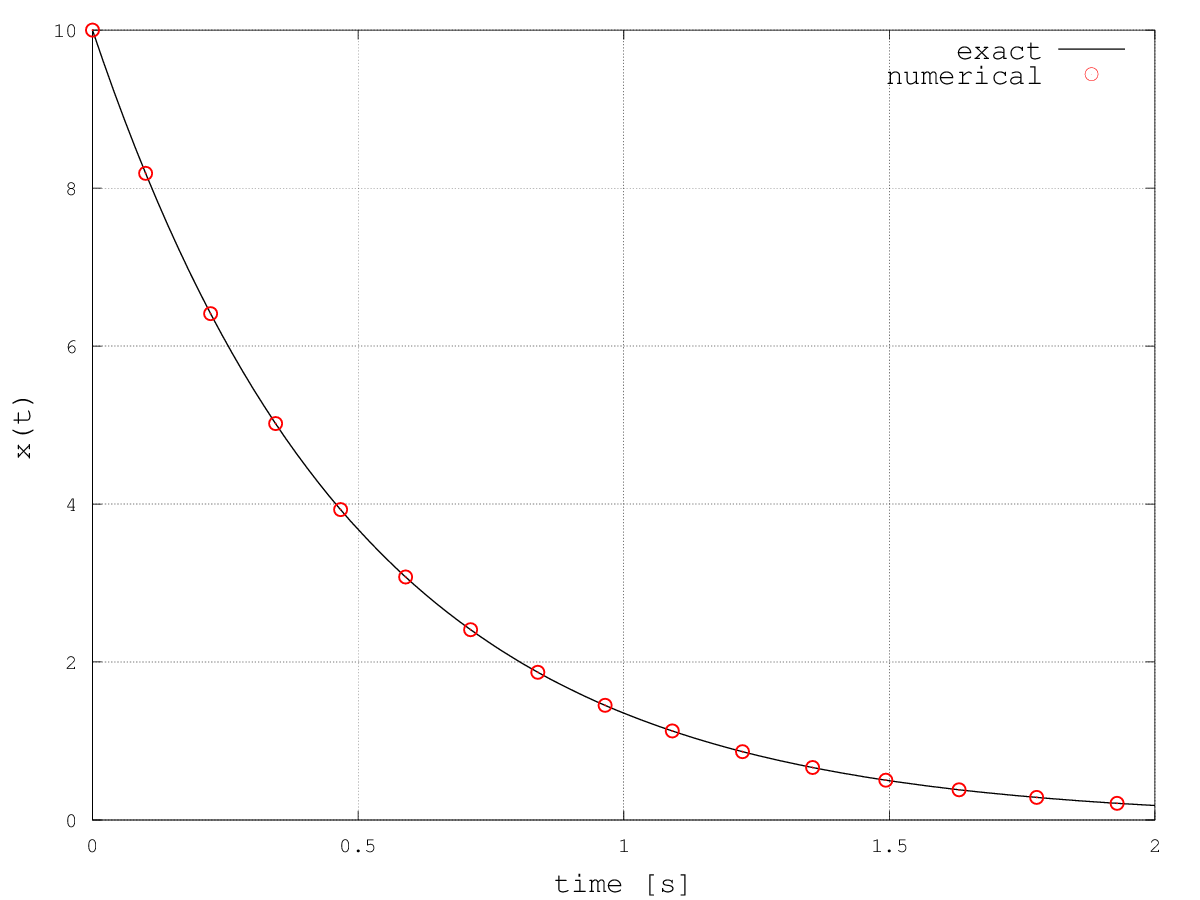
// System to be solved: dx/dt = -2 x
void my_system( const state_type &x , state_type &dxdt , const double t )
{ dxdt[0] = -2*x[0]; }
// Observer, prints time and state when called (during integration)
void my_observer( const state_type &x, const double t )
{ std::cout << t << " " << x[0] << std::endl; }
// ------ Main
int main()
{
state_type x0(1); // Initial condition, vector of 1 element (scalar problem)
x0[0] = 10.0;
// Integration parameters
double t0 = 0.0;
double t1 = 10.0;
double dt = 0.1;
// Run integrator
integrate( my_system, x0, t0, t1, dt, my_observer );
}
integrate_const( stepper , system , x0 , t0 , t1 , dt , observer )
integrate_n_steps( stepper , system , x0 , t0 , dt , n , observer )
integrate_times( stepper , system , x0 , times_start , times_end , dt , observer )
integrate_times( stepper , system , x0 , time_range , dt , observer )
integrate_adaptive( stepper , system , x0 , t0 , t1 , dt , observer )
integrate( system , x0 , t0 , t1 , dt , observer )
integrate_const( runge_kutta4<state_type>(), my_system, x0, t0, t1, dt, my_observer );
typedef runge_kutta4<state_type> rk4; integrate_const( rk4(), my_system, x0, t0, t1, dt, my_observer );
// ------ Main
int main()
{
state_type x(1); // the state, vector of 1 element (scalar problem)
x[0] = 10.0;
// Integration parameters
double t = 0.0;
double dt = 0.1;
size_t nSteps = 1000;
// Create stepper
runge_kutta4<state_type> rk4;
// Perform integration step by step
for(int ii = 0; ii < nSteps; ++ii)
{
// adjourn current time
t += dt;
// now perform only one integration step. Solution x is overwritten
rk4.do_step(my_system, x, t, dt);
// ... and output results
cout << t << " " << x[0] << endl;
}
}

#include <iostream>
#include <boost/numeric/odeint.hpp> // odeint function definitions
using namespace std;
using namespace boost::numeric::odeint;
// Defining a shorthand for the type of the mathematical state
typedef std::vector< double > state_type;
// System to be solved: dx/dt = -2 x
void my_system( const state_type &x , state_type &dxdt , const double t )
{
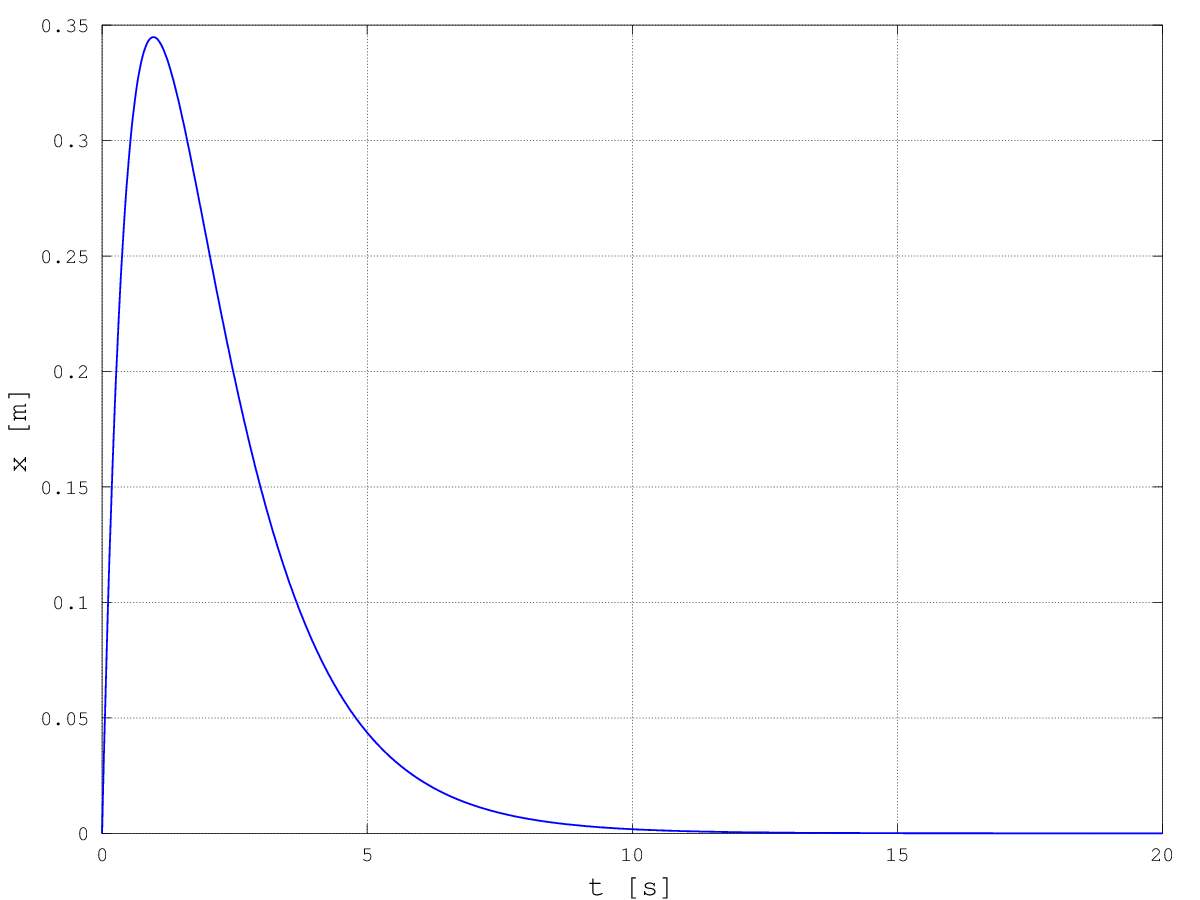
dxdt[0] = 0*x[0] + 1*x[1];
dxdt[1] = -1*x[0] - 2.2*x[1];
}
// Observer, prints time and state when called (during integration)
void my_observer( const state_type &x, const double t )
{
std::cout << t << " " << x[0] << " " << x[1] << std::endl;
}
// ------ Main
int main()
{
state_type x0(2); // Initial condition, vector of 2 elements (position and velocity)
x0[0] = 0.0;
x0[1] = 1.0;
// Integration parameters
double t0 = 0.0;
double t1 = 20.0;
double dt = 1.0;
// ---- Steppers definition ----
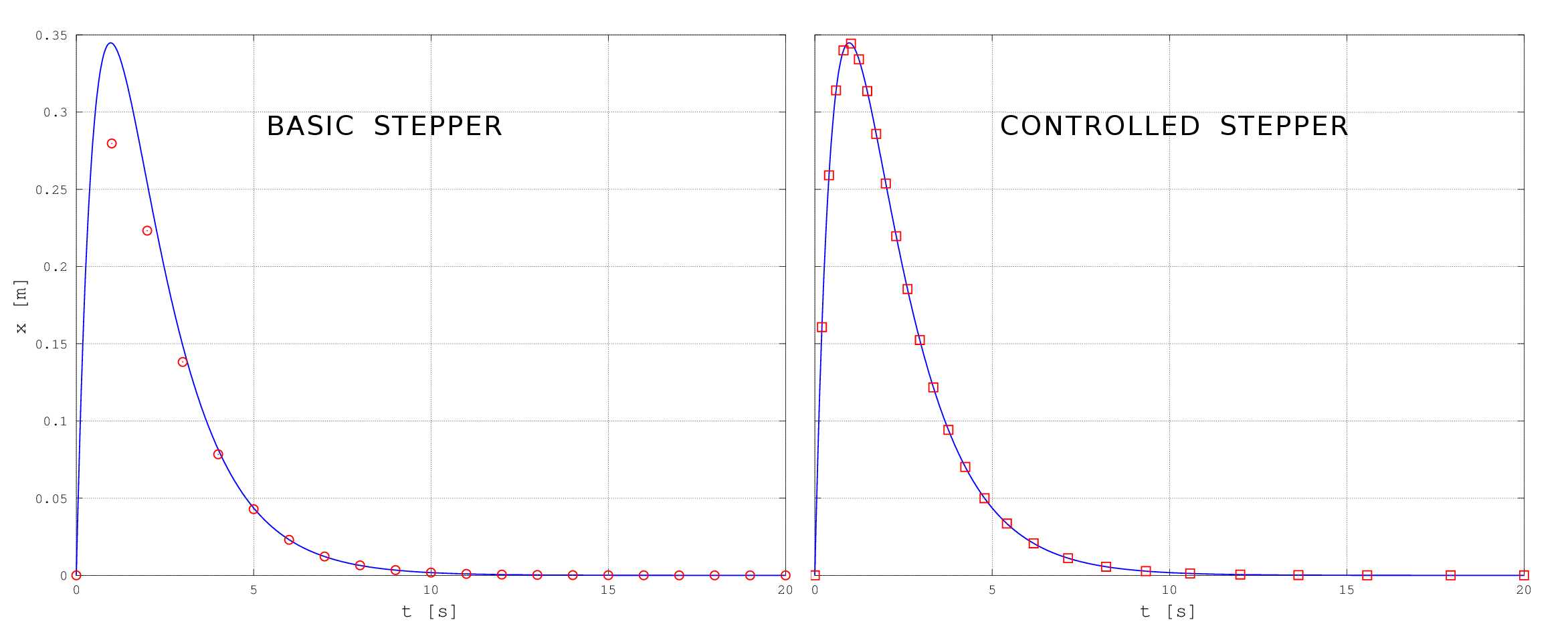
// Basic stepper:
// follows given timestep size "dt"
typedef runge_kutta4<state_type> rk4;
// Error stepper, used to create the controlled stepper
typedef runge_kutta_cash_karp54< state_type > rkck54;
// Controlled stepper:
// it's built on an error stepper and allows us to have the output at each
// internally defined (refined) timestep, via integrate_adaptive call
typedef controlled_runge_kutta< rkck54 > ctrl_rkck54;
// ---- Run integrations with the different steppers ----
// Run integrator with rk4 stepper
std::cout << "========== rk4 - basic stepper ====================" << std::endl;
integrate_adaptive( rk4(), my_system, x0, t0, t1, dt, my_observer );
// Run integrator with controlled stepper
std::cout << "========== ctrl_rkck54 - Controlled Stepper =======" << std::endl;
x0[0] = 0.0; // Reset initial conditions
x0[1] = 1.0;
integrate_adaptive( ctrl_rkck54(), my_system, x0 , t0 , t1 , dt, my_observer );
}
========== rk4 - basic stepper ==================== 0 0 1 1 0.279667 0.0914 2 0.223193 -0.0698595 3 0.138185 -0.0688047 4 0.0784087 -0.0449346 5 0.0428421 -0.0260353 6 0.0229939 -0.0143611 7 0.0122327 -0.00774322 8 0.00647889 -0.0041288 9 0.00342373 -0.0021893 10 0.00180716 -0.00115761 11 0.000953317 -0.000611208 12 0.000502743 -0.000322475 13 0.000265086 -0.000170075 14 0.000139763 -8.96806e-05 15 7.36854e-05 -4.72839e-05 16 3.88473e-05 -2.49291e-05 17 2.04802e-05 -1.31428e-05 18 1.07971e-05 -6.92889e-06 19 5.69216e-06 -3.65289e-06 20 3.00087e-06 -1.92578e-06 ========== ctrl_rkck54 - Controlled Stepper ======= 0 0 1 0.2 0.160729 0.62909 0.4 0.25906 0.369921 0.6 0.314033 0.191075 0.809566 0.339954 0.065062 1.01913 0.344383 -0.0166857 1.2428 0.33413 -0.0702323 1.47763 0.31359 -0.101238 1.73025 0.285836 -0.11597 2.00191 0.253734 -0.118652 2.29508 0.219629 -0.112967 2.6131 0.185377 -0.101919 2.96069 0.152372 -0.087867 3.34299 0.121725 -0.0726501 3.76712 0.0941826 -0.0576185 4.24293 0.0702024 -0.0437071 4.78465 0.049993 -0.0315045 5.41432 0.0335592 -0.0213196 6.17034 0.0207314 -0.0132375 7.13966 0.0111524 -0.00714214 8.2138 0.0056026 -0.0035926 9.33462 0.00272999 -0.00175145 10.5825 0.0012258 -0.00078657 11.998 0.00049426 -0.000317177 13.6366 0.000172728 -0.000110845 15.5745 4.98493e-05 -3.199e-05 17.9281 1.10743e-05 -7.10652e-06 20 2.9352e-06 -1.8835e-06
// Define the error stepper
typedef runge_kutta_cash_karp54< state_type > error_stepper_rkck54;
// Error bounds
double err_abs = 1.0e-10;
double err_rel = 1.0e-6;
// Fire!
integrate_adaptive( make_controlled( err_abs , err_rel , error_stepper_rkck54() ) ,
my_system , x0 , t0 , t1 , dt , my_observer );
Stiff problems are characterized by very different timescales.
Think for example at a chemically reacting mixture:
chemical rates may be very different among each others (by orders of magnitude!)
That characteristic makes common integrators inappropriate and one needs apposite
solvers.
Consider for example the following system:
This is basically a system where the derivative of the first component x1 is
likely way bigger than the one for the second component x2.
A quick check with matlab shows that a Runge-Kutta 45 adaptive method (ode45) takes
70000 steps to solve it into a certain interval, whereas a stiff solver (ode15) takes
only 100 timesteps!
The more the system stiffness, the more the disparity:
what if we increase the stiffness, then?
Let's put the coefficients of the first equation to 30000 and 20000, the required
timesteps for the nonstiff solver increase to 700000, while the stiff solver takes still
100 timesteps!!!
Of course, nobody knows what kind of black magic they put into Matlab functions, but I
think you are now convinced of the importance of stiff solvers.
Odeint implements some stiff solvers, such as the rosenbrock4, but they additionaly
require to provide the system Jacobian, that is the matrix of the partial derivatives.
Also, note that the stiff integrator of Odeint *requires* that the system state is of
ublas::vector type and the jacobian *must* be a ublas::matrix!
Here's a program that solves the problem defined above. Note that:
#include <iostream>
#include <boost/numeric/odeint.hpp> // odeint function definitions
using namespace std;
using namespace boost::numeric::odeint;
// Defining shorthands for boost types vector and matrix.
// vector is used for the system state "x" and matrix for the jacobian "J"
typedef boost::numeric::ublas::vector< double > vector_type;
typedef boost::numeric::ublas::matrix< double > matrix_type;
// System to be solved.
// This is a functor: "operator()" overloads the operator "()" making the
// struct behave like a function
struct my_system
{
void operator()( const vector_type &x, vector_type &dxdt, const double t)
{
dxdt[0] = -3000*x[0] -2000*x[1];
dxdt[1] = -2*x[0] -3*x[1];
}
};
// Jacobian of the system.
// Functor! See struct "my_system"
struct jacobian
{
void operator()( const vector_type &x, matrix_type &J, double t, vector_type &dfdt )
{
J(0,0) = -3000;
J(0,1) = -2000;
J(1,0) = -2;
J(1,1) = -3;
}
};
// Observer, prints time and state when called (during integration)
void my_observer( const vector_type &x, const double t )
{
std::cout << t << setw(15) << x[0] << setw(15) << x[1] << std::endl;
}
// ------ Main
int main()
{
vector_type x0(2); // Initial condition, vector of 2 elements (position and velocity)
x0[0] = 0.0;
x0[1] = 1.0;
// Integration parameters
double t0 = 0.0;
double t1 = 20.0;
double dt = 1.0;
// ---- Run integrations with the different steppers ----
// Stiff integration
integrate_const(make_dense_output< rosenbrock4< double > >(1.0e-6, 1.0e-6),
make_pair(my_system(), jacobian()),
x0, t0, t1, dt, my_observer);
}
Back to HOMEPAGE